













.
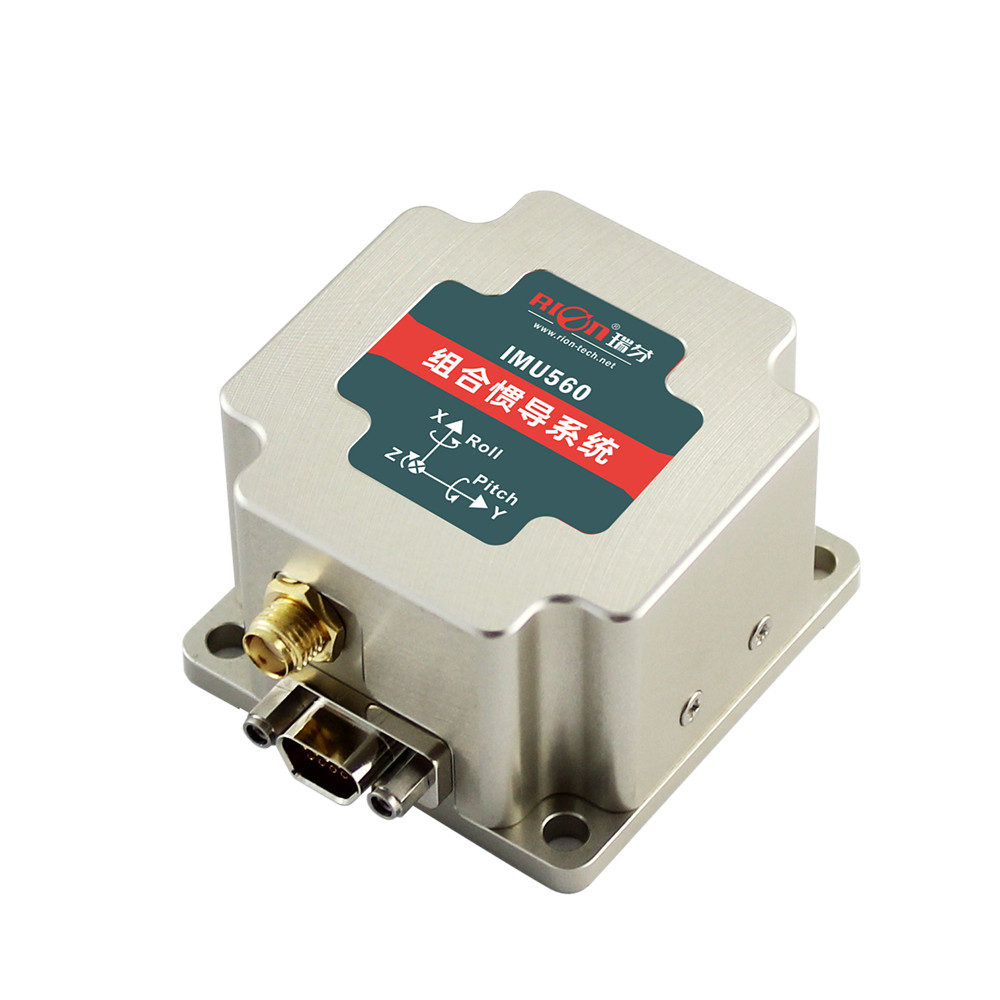
Secondo l'ordine di rotazione di Z-Y-X, quando la direzione positiva dell'ascissa è diretta verso la parte anteriore del trasportatore, l'angolo di rotazione intorno all'Z-asse è l'angolo di direzione, l'angolo di rotazione intorno all'asse y è il beccheggio e l'angolo di rotazione intorno all'ascissa è l'angolo di rollio.
